




 微信
微信 新浪
新浪在机器人系统的研发中,仿真技术已经成为不可或缺的环节。通过虚拟环境中的多维度测试验证,能够在实物制造前发现设计缺陷,优化控制策略,大幅降低开发成本和风险。根据实际工程经验,一个完整的机器人设计流程通常需要涵盖7大类仿真技术。
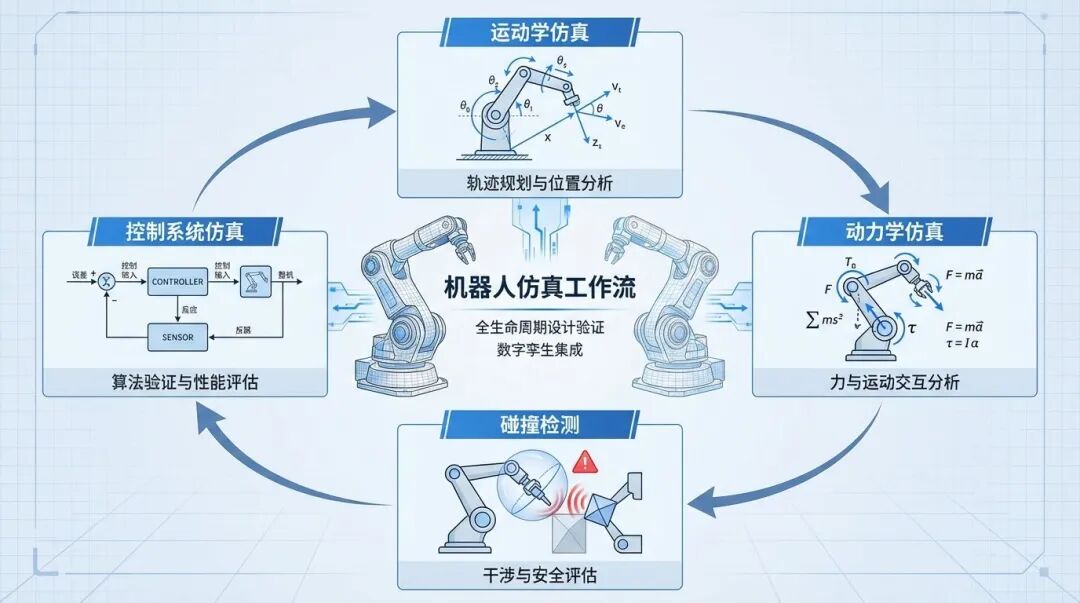
运动学仿真:机器人动作的几何基础
运动学仿真是机器人设计的第一步,主要解决"机器人能否到达指定位置"这一基本问题。通过建立D-H参数模型或者旋量理论模型,可以快速验证机械结构的工作空间、奇异点位置以及关节运动范围。
核心验证内容:
· 正运动学求解:已知关节角度,计算末端执行器位姿
· 逆运动学求解:已知目标位姿,求解关节角度组合
· 工作空间分析:绘制可达空间包络,识别盲区
· 奇异性检测:找出雅可比矩阵秩亏损的危险配置
常用工具软件:
· MATLAB Robotics Toolbox:学术界和算法验证的首选
· RoboDK:工业机器人离线编程与仿真平台
· V-REP/CoppeliaSim:支持多种机器人模型的开源仿真器
工程实践中需要注意,运动学仿真必须考虑实际机械结构的公差累积效应。某些理论上可达的位姿,在装配误差的影响下可能会出现较大偏差。
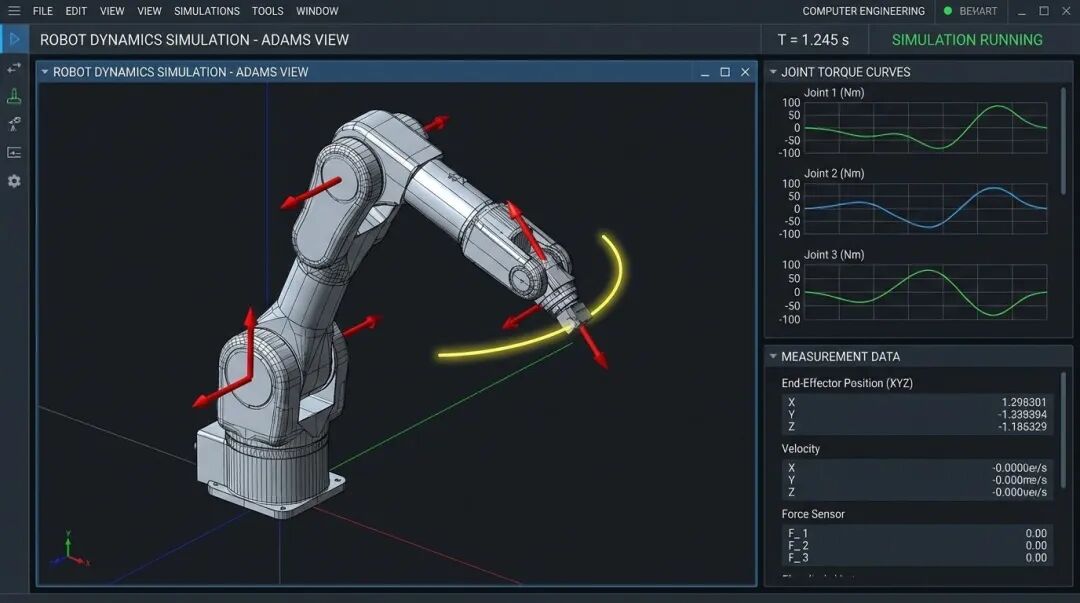
动力学仿真:预测真实运动行为
如果说运动学回答"能不能到达",那么动力学仿真解决的是"如何到达"以及"需要多大驱动力"的问题。这一环节对于电机选型、减速器配置、能耗评估至关重要。
仿真分析要点:
· 刚体动力学建模:基于拉格朗日方程或牛顿-欧拉递推算法
· 驱动力矩计算:根据运动轨迹计算各关节所需扭矩
· 碰撞与接触力分析:抓取操作中的接触力分布
· 柔性体动力学:长臂架或高速运动时的结构振动
主流软件平台:
· MSC Adams:机械系统动力学仿真的行业标准
· RecurDyn:擅长处理复杂接触和柔性体问题
· MapleSim:基于物理建模的多学科仿真工具
· Simscape Multibody:MATLAB环境下的多体动力学模块
实际应用中,动力学仿真的精度高度依赖于参数准确性。质量分布、转动惯量、摩擦系数等参数的获取往往需要结合CAD模型和实验测量。
碰撞检测仿真:安全设计的关键
协作机器人的兴起使得碰撞检测仿真变得尤为重要。这类仿真不仅要检测机器人自身关节之间的干涉,还要预测与环境、操作人员的潜在碰撞风险。
检测层级:
1. 自碰撞检测:相邻或间隔关节之间的几何干涉
2. 环境碰撞检测:与工作台、夹具、障碍物的碰撞
3. 动态避障仿真:运动过程中的实时路径规划
4. 安全距离验证:ISO/TS 15066标准下的协作空间设计
技术实现方法:
· 包围盒算法:AABB、OBB快速粗检测
· GJK算法:精确计算凸多面体之间的最短距离
· 基于距离场的方法:适合复杂环境的快速查询
· GPU加速碰撞检测:实时性要求高的场景
主流的机器人仿真平台如Gazebo、Webots、Isaac Sim都集成了高效的碰撞检测引擎。但需要注意,仿真中的碰撞模型精度与计算效率是一对矛盾,需要根据应用场景权衡。
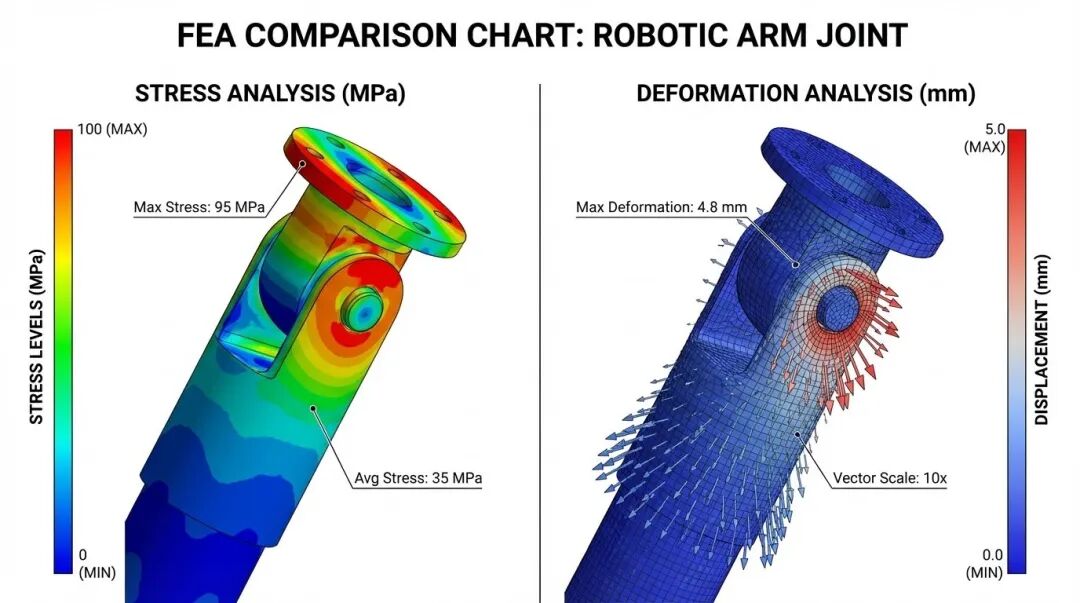
有限元分析:结构强度与刚度验证
机器人的关键承载部件需要经过有限元分析(FEA)来验证结构强度、刚度和疲劳寿命。这对于轻量化设计和高负载应用场景尤为关键。
分析类型:
· 静力学分析:最大应力、安全系数、变形量评估
· 模态分析:固有频率和振型识别,避免共振
· 疲劳分析:循环载荷下的疲劳寿命预测
· 热-结构耦合分析:电机发热对结构的影响
软件工具对比:
|
软件 |
优势 |
典型应用 |
|
ANSYS Workbench |
接口友好,前后处理完善 |
通用结构分析 |
|
Abaqus |
非线性分析能力强 |
复杂接触、大变形 |
|
Nastran |
航空航天领域标准 |
大型装配体分析 |
|
SolidWorks Simulation |
CAD集成度高 |
快速设计验证 |
工程经验表明,有限元网格质量直接影响计算精度。对于应力集中区域如螺栓孔、焊缝、倒角处,需要进行网格细化。同时要注意边界条件的合理设定,过约束或欠约束都会导致失真结果。
控制系统仿真:算法验证的虚拟试验台
控制系统的设计与调试占据机器人开发周期的相当比重。通过仿真环境可以在没有硬件的情况下完成控制算法的开发、参数整定和鲁棒性测试。
仿真内容:
· PID控制器参数整定:响应速度与超调量的权衡
· 轨迹跟踪性能评估:位置误差、速度波动分析
· 力控制算法验证:阻抗控制、导纳控制策略测试
· 鲁棒性测试:参数摄动、外界干扰下的性能验证
典型工具链:
· MATLAB/Simulink:控制算法开发的事实标准
· ROS+Gazebo:开源机器人中间件与物理仿真器的组合
· Webots:内置控制器接口,支持多种编程语言
· NVIDIA Isaac Sim:基于物理引擎的高真实感仿真
控制系统仿真需要注意模型保真度的平衡。过于简化的模型可能遗漏重要的动力学特性,而过于复杂的模型会拖慢仿真速度,影响迭代效率。经验表明,使用降阶模型配合关键非线性特性的建模方式较为实用。
传感器仿真:感知系统的虚拟校准
现代机器人高度依赖视觉、力觉、触觉等多模态传感器。传感器仿真能够在虚拟环境中生成传感器数据,用于感知算法的开发和测试。
主要传感器类型:
· 视觉传感器:相机成像模型、深度相机点云生成
· 激光雷达:2D/3D激光扫描数据仿真
· 力/力矩传感器:六维力信号仿真
· IMU惯性测量单元:加速度、角速度数据生成
仿真难点:
· 传感器噪声建模:高斯噪声、椒盐噪声、量化误差
· 光照条件变化:环境光对视觉系统的影响
· 多传感器时间同步:不同采样率的数据融合
· 传感器标定仿真:内参、外参标定算法验证
在ROS生态中,Gazebo可以通过插件机制仿真各类传感器。NVIDIA Isaac Sim则提供了更加逼真的光线追踪渲染和物理准确的传感器模型。但需要认识到,仿真传感器数据与真实数据之间始终存在"现实鸿沟"(Reality Gap),需要通过域随机化、域自适应等技术来弥合。
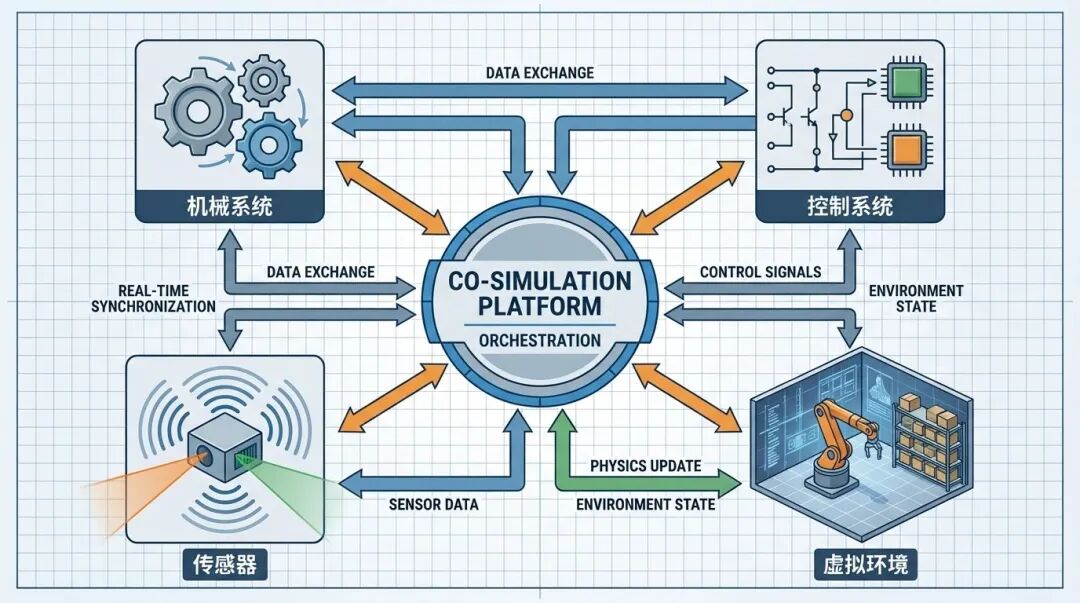
协同仿真:多学科融合的系统级验证
随着机器人系统复杂度的提升,单一领域的仿真已经难以满足需求。协同仿真通过耦合机械、电气、控制、软件等多学科模型,实现系统级的综合验证。
典型协同仿真模式:
· 机-电协同:机械动力学+电机驱动模型
· 控制-机械协同:控制算法+刚柔耦合动力学
· 软件在环(SIL):实际控制代码+虚拟机器人
· 硬件在环(HIL):真实控制器+实时仿真器
协同仿真标准:
· FMI(Functional Mock-up Interface):工具间模型交换标准
· DCP(Distributed Co-Simulation Protocol):分布式协同仿真协议
· HLA(High Level Architecture):大规模复杂系统仿真标准
实施要点:
1. 接口定义:明确各子系统的输入输出接口
2. 时间同步:处理不同仿真步长和求解器的同步问题
3. 数据交换:高效的进程间或网络数据传输
4. 计算资源分配:合理分配CPU/GPU资源避免瓶颈
实际工程中,协同仿真的搭建往往需要大量的接口适配工作。选择支持FMI标准的仿真工具能够显著降低集成难度。同时需要注意,协同仿真的计算开销较大,通常需要高性能工作站或集群支持。
仿真技术选型的工程考量
面对众多的仿真工具和技术路线,如何根据项目需求做出合理选择是工程师需要思考的问题。
选型维度:
· 机器人类型:工业机器人、协作机器人、移动机器人、特种机器人
· 开发阶段:概念设计、详细设计、样机验证、批量生产
· 分析精度要求:粗略估算、工程精度、高精度预测
· 计算资源约束:单机、工作站、高性能集群
· 团队技能储备:学习曲线、培训成本、技术支持
工具链组合建议:
· 快速概念验证:MATLAB + SolidWorks
· 详细工程设计:Adams + ANSYS + MATLAB
· 开源开发路线:ROS + Gazebo + Python
· 高端仿真需求:Simcenter + Abaqus + dSPACE
常见误区:
1. 过度依赖仿真:仿真不能完全替代物理试验
2. 模型过度简化:忽略关键物理效应导致失真
3. 参数来源不明:未经验证的经验值影响精度
4. 忽视验证环节:仿真结果未与实验数据对标
从仿真到实物:缩小现实差距
无论仿真技术多么先进,最终都要面对"仿真验证"与"实物测试"之间的差距。缩小这一差距需要系统性的方法。
关键措施:
· 模型参数实测:质量、惯量、摩擦系数等关键参数的实验测定
· 分阶段验证:从单关节、单轴到整机的逐级验证
· 对标测试:相同工况下仿真结果与实测数据的误差分析
· 模型迭代优化:根据实测数据反向修正仿真模型
· 不确定性量化:使用蒙特卡洛等方法评估参数不确定性的影响
数字孪生的进阶应用:
近年来,数字孪生(Digital Twin)概念在机器人领域逐渐落地。通过在实体机器人上布置传感器,实时采集运行数据回传到仿真模型,实现虚实同步。这使得仿真模型不再是设计阶段的一次性工具,而是贯穿全生命周期的虚拟镜像,可用于:
· 远程监控与诊断
· 预测性维护
· 控制策略在线优化
· 产线数字化管理
结语
机器人设计中的仿真技术已经形成了一个完整的工具链和方法论体系。从运动学、动力学的基础分析,到有限元、控制仿真的深度验证,再到协同仿真的系统级集成,每一类仿真技术都有其独特的价值和适用场景。
掌握这些仿真技术并非一蹴而就,需要理论学习、软件实践、工程验证的持续积累。但投入是值得的——一个完善的仿真流程可以将机器人研发周期缩短30-50%,显著降低试错成本,提升产品可靠性。
随着人工智能、云计算、实时物理引擎等技术的发展,机器人仿真正在向更高真实度、更快计算速度、更智能的方向演进。未来,仿真与实物的边界将会更加模糊,虚实融合将成为机器人研发的新常态。
_1.png)
__1.jpg)
__1.jpg)

 咨询电话:13298357687 游老师
咨询电话:13298357687 游老师
 邮箱:cdsn@cdsnet.com.cn
邮箱:cdsn@cdsnet.com.cn
 地址:北京市丰台区花乡高立庄616号新华国际中心C座3层
地址:北京市丰台区花乡高立庄616号新华国际中心C座3层

微信公众号